EN
Language
All categories






Product ID: 67081119
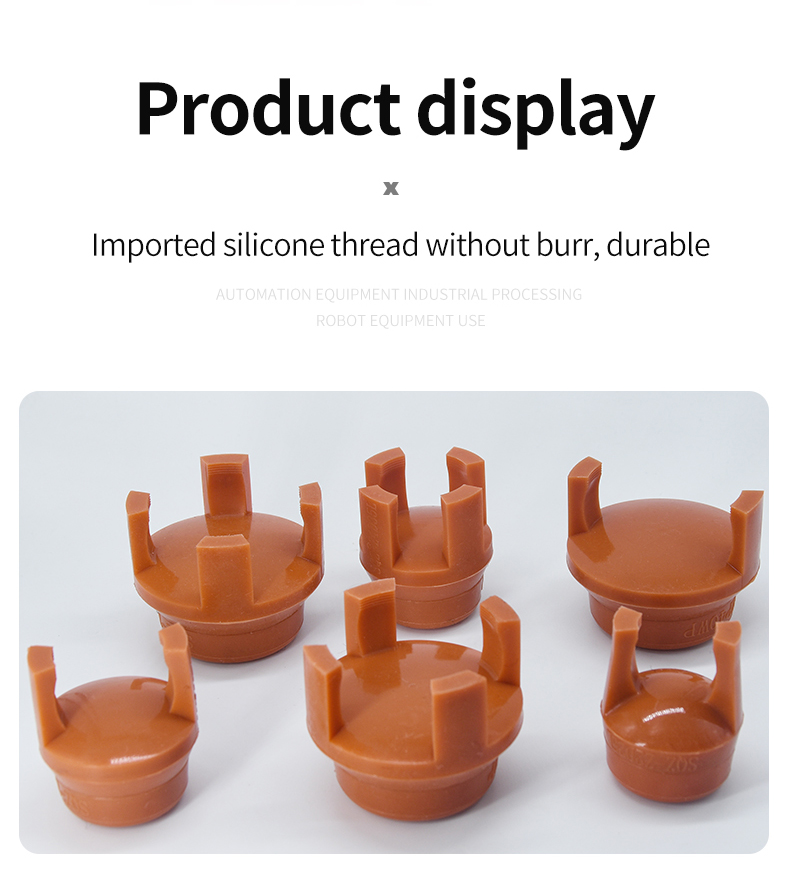
Pneumatic Vacuum Soft Gripper: Flexible Food Grade Robot Gripper
Contact Now
Description
产品描述
简介
柔性夹具由硅胶和嵌入式板组成。真空压力被引入真空室,球囊的凹形变形产生径向应力,从而驱动球囊橡胶爪表面的凹形变形,产生压应力来抓取工件。当真空压力断开时,球囊会反弹并重置,橡胶爪也会相应地重置。







You may also like








Contact Now
Please Send Message
${currentPro.title}